
-
- Downloads
Calibration & Planning/Calibration
parent
95417c2c
No related branches found
No related tags found
Showing
- docs/source/calibration/extrinsic_calibration.md 106 additions, 1 deletiondocs/source/calibration/extrinsic_calibration.md
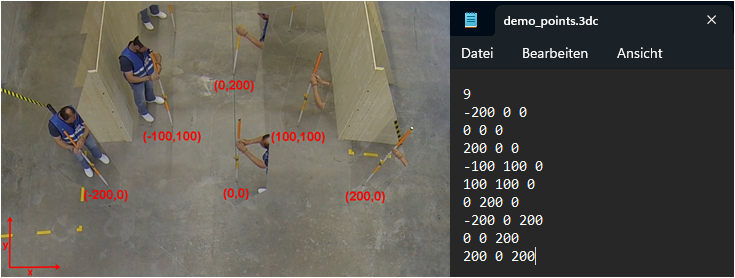
- docs/source/calibration/images/demo_points.3dc 10 additions, 0 deletionsdocs/source/calibration/images/demo_points.3dc
- docs/source/calibration/images/extrinsic_all_enlarged.png 0 additions, 0 deletionsdocs/source/calibration/images/extrinsic_all_enlarged.png
- docs/source/calibration/images/extrinsic_grid_and_points.png 0 additions, 0 deletionsdocs/source/calibration/images/extrinsic_grid_and_points.png
- docs/source/calibration/images/extrinsic_select_points.png 0 additions, 0 deletionsdocs/source/calibration/images/extrinsic_select_points.png
- docs/source/calibration/images/intrinsic_calibration_section.png 0 additions, 0 deletions...urce/calibration/images/intrinsic_calibration_section.png
- docs/source/calibration/images/photothumb.db 0 additions, 0 deletionsdocs/source/calibration/images/photothumb.db
- docs/source/calibration/images/points.png 0 additions, 0 deletionsdocs/source/calibration/images/points.png
- docs/source/calibration/images/pre_post_intrinsic.jpg 0 additions, 0 deletionsdocs/source/calibration/images/pre_post_intrinsic.jpg
- docs/source/calibration/intrinsic_calibration.md 56 additions, 2 deletionsdocs/source/calibration/intrinsic_calibration.md
- docs/source/planning/calibration.md 114 additions, 0 deletionsdocs/source/planning/calibration.md
- docs/source/planning/camera.md 106 additions, 44 deletionsdocs/source/planning/camera.md
- docs/source/planning/images/calibration_examples.jpg 0 additions, 0 deletionsdocs/source/planning/images/calibration_examples.jpg
- docs/source/planning/images/chessboard.jpg 0 additions, 0 deletionsdocs/source/planning/images/chessboard.jpg
- docs/source/planning/images/chessboard_border.jpg 0 additions, 0 deletionsdocs/source/planning/images/chessboard_border.jpg
- docs/source/planning/images/chessboard_coverage.jpg 0 additions, 0 deletionsdocs/source/planning/images/chessboard_coverage.jpg
- docs/source/planning/images/coordinate_grid.png 0 additions, 0 deletionsdocs/source/planning/images/coordinate_grid.png
- docs/source/planning/images/ranging_pole_level.png 0 additions, 0 deletionsdocs/source/planning/images/ranging_pole_level.png
- docs/source/planning/planning.md 1 addition, 0 deletionsdocs/source/planning/planning.md
{kind=link}

842 KiB
{kind=link}
253 KiB
{kind=link}

540 KiB
{kind=link}

54.7 KiB
docs/source/calibration/images/photothumb.db
0 → 100644
File added
docs/source/calibration/images/points.png
0 → 100644
{kind=link}

6.26 KiB
{kind=link}

420 KiB
docs/source/planning/calibration.md
0 → 100644
{kind=link}

332 KiB
docs/source/planning/images/chessboard.jpg
0 → 100644
{kind=link}

106 KiB
{kind=link}

114 KiB
{kind=link}

248 KiB
{kind=link}

605 KiB
{kind=link}

118 KiB